Region¶
A Region is the Pod flavor responsible for building customer infrastructure.
Each Region has an instance of an agent called Robot that uses the CloudCIX IaaS API to determine if changes have been requested in its Region. Robot’s task is to communicate with the COP, via the API, and to bring the virtual infrastructure in its Region into synchronisation with the metadata in IaaS.
Networking in each Region is controlled by a PodNet Appliance.
Each Project in a CloudCIX Region uses a separate virtual router (VR) built using a Linux networking namespace, on PodNet to ensure total project separation.
Each Project has one or more Private Networks.
Each Project can implement one or more Site to Site VPN tunnels.
Management Network Schema¶
Within every region the management bus is used to allow robot communicate with the hosts within the region.
Network Drive¶
- A Network File System (NFS) mount drive on the Region POD appliance, configured during the POD Installation. It is used by the Robot for storing:
OS ISO files
Windows VHDx files
VMs metadata
Robot when building a VM, looks for VM OS ISO file for Linux VMs or VHDx file for Windows VMs in this drive. It will download the file from https://downloads.cloudcix.com/robot if the file is unavailable. All the supported ISO and VHDx files are uploaded to this link by CloudCIX. Robot mounts this drive on the KVM or HyperV host to supply these files during the VM build stage.
Robot uses this drive to store VM metadata such as auto-installation config files for example kickstart files or unattend answer files. The metadata is removed after they are used.
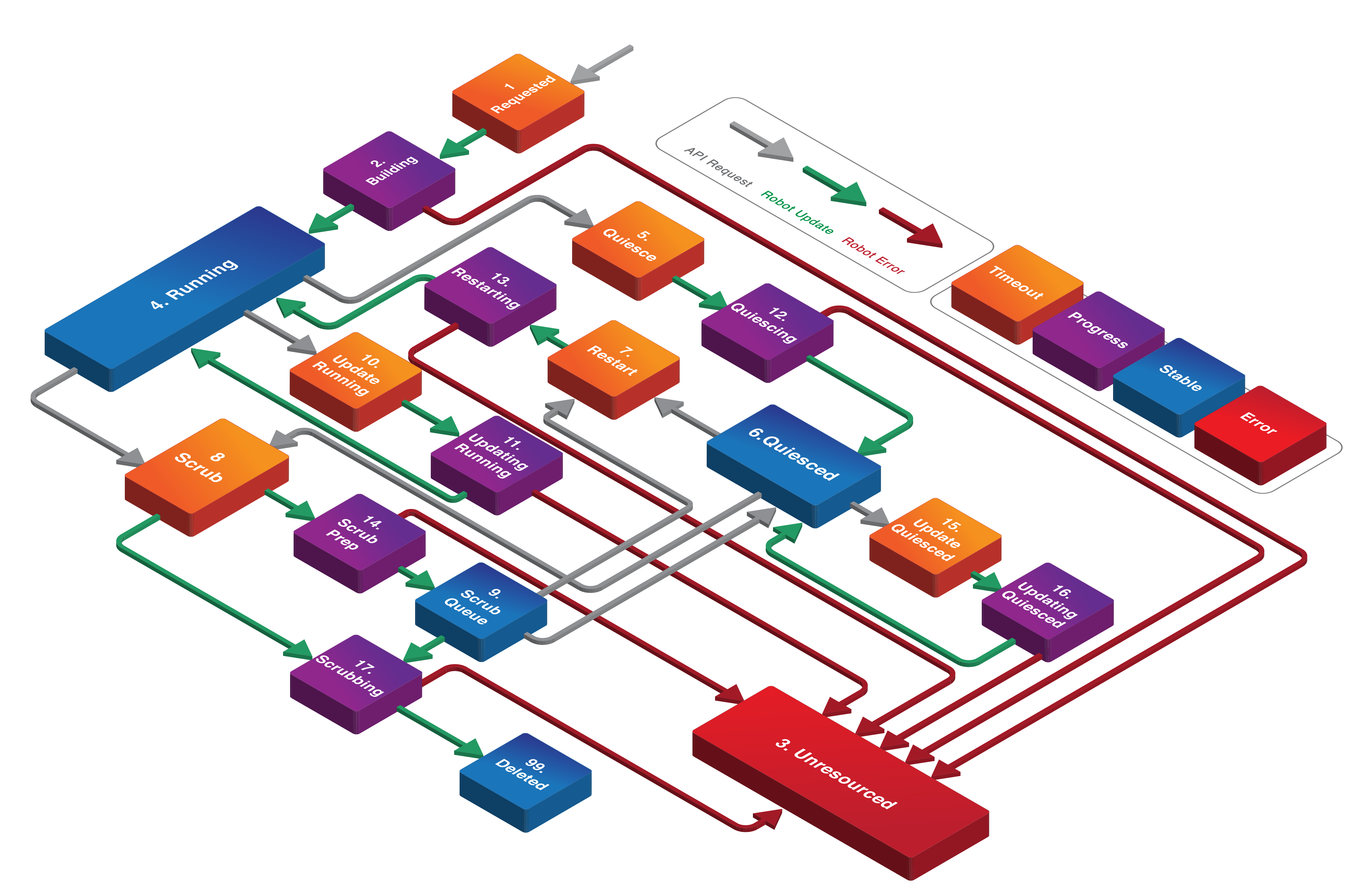
Robot (Region Oriented Builder of Things)¶
Robot is the most important application running in the Region appliance. The function of Robot is to instanciate infrastructure to match the users declared requirements. Robot creates, updates, and deletes virtual infrastructure.
Robot is a stateless application developed in Python. Robot interacts with the CloudCIX IaaS Application in the COP via the CloudCIX IaaS API. Robot performs a perpetual loop that queries IaaS.
COP - CloudCIX Membership¶
A region in CloudCIX Membership is an address in a member. A member can have multiple addresses, of which there can be multiple regions.
Documentation on how to Create a Region in the COP DataBase can be found here